

![]() 来源:艾特贸易2017-06-05
来源:艾特贸易2017-06-05
简介电动机切断电源以后,由于惯性作用不会马上停止转动,而是需要转动一段时间才会完全停止下来。这种情况对于某些生产机械是不行的。例如起重机的吊钩需要准确定位;万能铣床要
电动机切断电源以后,由于惯性作用不会马上停止转动,而是需要转动一段时间才会完全停止下来。这种情况对于某些生产机械是不行的。例如起重机的吊钩需要准确定位;万能铣床要求立即停止等。满足生产机械的这种要求就需要对电动机进行制动。
所谓制动,就是给电动机一个与转动方向相反的转矩使其迅速停转(或限制其转速)。制动的方法一般有两类:机械制动和电力制动,艾特贸易网这里不讨论机械制动,而着重讨论电力制动控制电路及其PLC改造方法。
1.双向起动反接制动线路电气原理图
双向起动反接制动控制电路的电气原理图如图6-61所示,该线路所用的电器必较多,其中KM1既是正转运行接触器,又是反转运行时的反接制动接触器;KM2既是反转运行接触器,又是正转运行时的反接制动接触器;KM3做短接限流电阻R用;中间继电器KA1、KA3和接触器KM1、KM3配合完成电动机的正向起动、反接制动的控制要求;中间继电器KA2、KA4和接触器KM2、KM3配合完成电动机的反向起动、反接制动的控制要求;速度继电器KS有两对常开触点KS-1、KS-2,分别用于控制电动机正转和反转时反接制动的时间;R既是反接制动限流电阻,又是正向起动的限流电阻。

图6-61 双向起动反接制动控制电路
该线路的工作原理简述如下:先合上电源开关QS。
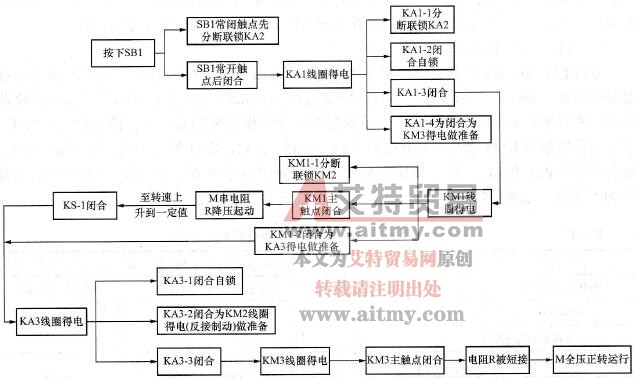
(1)正转起动运转。
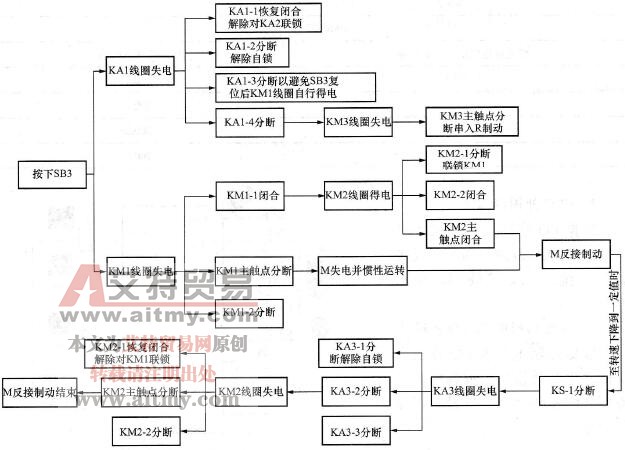
(2)反接制动停转。
电动机的反向起动及反接制动控制是由起动按SB2、中间继电器KA2、KA4、接触器KM2、KM3、停止按钮SB3、速度继电器的常开触点KS-2等电器来配合完成,其起动过程、制动过程与正向起动反接制动类同,可在理解了以上工作过程的基础上自行分析。
2.PLC的I/O分配表
分析上述双向起动反接制动控制电路的电气原理图可知,在该电路中,输入设备有热继电器辅助触点FR、正转起动按钮SB1、反转起动按钮SB2、停止按钮SB3以及速度继电器的两个常开触点KS-1和KS-2;输出设备有正转接触器线圈KM1、反转接触器线圈KM2、全压运行接触器KM3以及中间继电器KA1、KA2、KA3、KA4等的线圈。结合这些输入/输出设备将PLC的输入/输出地址及内部继电器地址按需分配给上述输入/输出设备可即得用PLC改在该系统所需的I/O分配表,如表6-12所示。
表6-12 PLC改造双向起动反接制动控制系统的I/O分配表

3.PLC外围接线图
根据I/O分配表和控制要求绘制出用PLC改造双向起动反接制动系统的PLC接线图,如图6-62所示。

图6-62 双向起动反接制动控制系统的PLC接线图
4.绘制梯形图及指令表程序
根据控制电路及I/O分配表采用“电路移植法”编制梯形图程序如图6-63所示,这是不正确的做法。
")
图6-63 直接采用“电路移植法”编制的双向起动反接制动梯形图控制程序(不正确)
很明显直接按着继电器接触控制电路移植过来的梯形图程序存在不符合编程规则的地方,因此该程序无法编译通过,在此基础上,对梯形图程序按着约定的编程规则进行整理变换之后即得到如图6-64所示正确的梯形图程序及指令表。
")
图6-64 整理变换之后的双向起动反接制动梯形图及指令表控制程序(正确)
(a)经整理变换之后的梯形图程序;(b)指令表
下面以图6-65所示的梯形图程序动态运行图为例来具体分析该电路的正转起动反接制动的详细过程。至于反转起动反接制动的过程与正转起动反接制动类同,请自行运行调试程序并分析。


图6-65 正转起动反接制动梯形图程序动态运行图

 PLC编程的基本规则
PLC编程的基本规则





