

![]() 来源:艾特贸易2017-06-05
来源:艾特贸易2017-06-05
简介位置控制线路(又称行程控制或限位控制线路)中的关键器件便是位置开关(行程开关)。位置开关是一种将机械信号转换为电气信号,以控制运动部件位置或行程的自动控制电器。而
位置控制线路(又称行程控制或限位控制线路)中的关键器件便是位置开关(行程开关)。位置开关是一种将机械信号转换为电气信号,以控制运动部件位置或行程的自动控制电器。而位置控制就是利用生产机械运动部件上的挡铁与位置开关碰撞,使其触点动作,来接通或断开相关控制电路,以实现对生产机械运动部件的位置或行程的自动控制。
1.位置控制电气原理图
图6-27所示即为位置控制电路的电气原理图。工厂车间里的行车常采用这种控制线路,不难看出该电路的是在按钮、接触器双重联锁的正反转控制电路的基础上改造过来的,将双重联锁正反转控制电路中正反转起动按钮的常闭联锁触点替换为位置开关的常闭触点即可。

图6-27 位置控制电路
图6-28是行车运动示意图,行车行程的两头终点处各安装有一个位置开关SQ1和SQ2,将这两个位置开关的常闭触点分别串接在正转控制电路和反转控制电路中。行车前后各装有挡铁1和挡铁2,行车的行程和位置可通过调整位置开关的安装位置来调节。

图6-28 行车运动示意图
该电路的工作原理简述如下:先合上电源开关QS。
(1)行车向前运动。
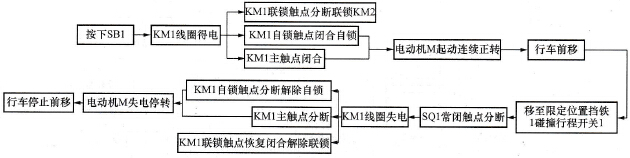
此时,即使再按下SB1,由于SQ1常闭触点已分断,接触器KM1线圈无法得电,保证了行车不会超越SQ1所限定的安全位置。
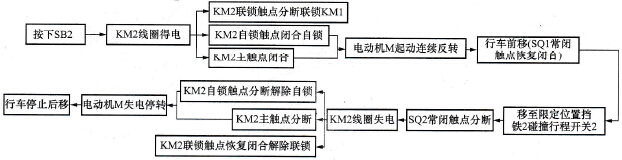
(2)行车向后运动。
(3)停车时。只需按下SB3则正反转接触器控制回路均断电使电机停机处于待机状态。
2.PLC的I/O分配表
从位置控制电路的线路图不难看出,该电路中输入设备有热继电器辅助触点FR、停止按钮SB3、正转向前起动按钮SB1、反转向后起动按钮SB2以及位置开关的常闭触点SQ1和SQ2;输出设备有正转向前交流接触器线圈KM1,反转向后交流接触器线圈KM2。现将PLC输入/输出地址分配给上述设备得到表6-5所示I/O分配表。
表6-5 PLC控制位置控制电路I/O分配表

3.PLC外围接线图
根据上述I/O分配表绘制出用PLC控制位置电路的外围接线图,如图6-29所示。

图6-29 PLC位置控制系统接线图
4.绘制梯形图程序及指令表
根据上述I/O分配表及外围接线图结合位置控制线路的控制电路,采用“电路移植法”绘制梯形图程序及指令表如图6-30所示。

图6-30 用PLC控制位置电路的梯形图及指令表程序
(a)梯形图;(b)指令表
下面以图6-31所示的梯形图程序动态运行图来详细描述该程序的执行过程。

图6-31 PLC控制位置控制功能电路梯形图程序执行状态转换图
从图6-31不难看出,当PLC输入端子上的所接的全部按钮均未动作时,梯形图程序中与之对应的0.01常开触点、0.02常开触点均处于断开状态,而0.03常闭触点、0.04常闭触点、0.05常闭触点经过对SB3、SQ1、SQ2的状态“取反”运算之后均处于闭合状态,10.01、10.02的常闭触点及常开触点也因其对应的线圈未得电,而各自处于未得电的初始状态。0.01常开触点、0.02常开触点处于断开状态致使能流无法通过它们到达10.01线圈和10.02线圈,受其控制的电动机处于待机状态。
当操作人员压合SB1按钮时,与之对应的内部0.01常开触点随之闭合,能流通过该触点及其串联的常闭触点所构成的通路到达10.01线圈。10.01线圈获得能流通过,一方面其并联在0.01常开触点两端的10.01常开触点闭合自锁,串联在10.02线圈支路中的10.01常闭触点断开联锁10.02线圈;另一方面其输出端子上的物理触点也随之闭合接通KM1线圈通路,使其有电流通过产生电磁吸力吸合主触点以接通电动机电源,使电动机得电连续正转拖动行车向前运行。当行车运行到SQ1位置时,挡铁撞合外接于PLC输入端子上的常开按钮SQ1,程序内部与之对应的内部0.04常闭触点对SQ1的状态“取反”运算之后断开,切断10.01线圈的能流路径,使其失电并解除自锁,输出端子上的物理触点分断KM1线圈的电流通路,主触点分断电动机电源使其停转,同时10.01常闭触点恢复闭合解除对10.02线圈的联锁,为反转起动做好准备。此时由于行车挡铁压合着SQ1而致使0.04常闭触点处于分断状态,若操作人员仍压下正转起动按钮SB1,确保10.01线圈不会得电,从而有效地保护了行车不会超出安全工作范围(SQ1所限位置)。
行车位于SQ1位置时若操作人员压合反转起动按钮SB2,则程序中与之对应的0.02常开触点随之闭合,能流经过该触点及其串联的常闭触点到达10.02线圈。10.02线圈获得能流,一方面其并联在0.02常开触点两端10.02常开触点闭合自锁,串联在10.01线圈支路中的10.02常闭触点断开以联锁10.01线圈,另一方面其输出端子上的物理触点也随之闭合接通KM2线圈通路,使其有电流通过产生电磁吸力吸合主触点以接通电动机电源,使电动机换相通电连续反转拖动行车向后运行(由于行车在电动机带动下向后运行离开SQ1使SQ1断开复位,0.04常闭触点则闭合解除对10.01线圈的联锁)。当行车运行到SQ2位置时,挡铁撞合外接于PLC输入端子上的常开按钮SQ2,程序中与之对应内部0.05常闭触点对SQ2的状态“取反”运算之后断开,切断10.02线圈的能流路径,使其失电并解除自锁,输出端子上的物理触点分断KM2线圈的能流通路,主触点分断电动机电源使其停转,同时10.02常闭触点恢复闭合解除对10.01线罔的联锁,为下一次正转起动做好准备。此时由于行车挡铁压合着SQ2致使0.05常闭触点处于分断状态,若操作者仍压下反转起动按钮SB2确保10.02线圈不会得电,从而有效地保护了行车不会超出安全工作范围(SQ2所限位置)。如此反复循环,则电动机拖动行车被限定在SQ1与SQ2安装行程之间来回运行。
停车则只需压合SB3,程序中与之对应0.03伟闭触点就会分断10.01线圈或10.02线圈的能流路径。电动机过载造成FR动作引起的停机保护过程与停车过程类似,请自行分析。

 PLC编程的基本规则
PLC编程的基本规则





