

![]() 来源:艾特贸易2017-06-05
来源:艾特贸易2017-06-05
简介经验设计法也叫试凑法,经验设计方法需要设计者熟练掌握一些常见的典型电路,在此基础上再根据被控对象对控制的要求,将实际控制问题分解成典型控制电路,不断地修改和完善梯
经验设计法也叫试凑法,经验设计方法需要设计者熟练掌握一些常见的典型电路,在此基础上再根据被控对象对控制的要求,将实际控制问题分解成典型控制电路,不断地修改和完善梯形图,只到满足要求为止。 经验设计法对于一些比较简单的或与某些典型程序相类似的控制系统的设计是比较奏效的。但由于该方法主要是依靠设计人员的经验进行设计,没有普遍的规律可以遵循,设计所用的时间、设计的质量与编程者的经验有较大关系,故对设计人员的要求较高。对于较复杂的系统,经验设计法一般设计周期长,不易掌握,系统交付使用后维护困难,一般要采用其他方法如顺序功能图设计法等实现。 下面以运料小车控制系统为例介绍经验设计法。 (1)控制要求 运料小车在SQ1处装料(20s),然后开始右行;到达SQ2后卸料(15s),然后开始左行;这样不停往复工作,直到按下停止按钮,如图6-3所示。 图6-3 控制要求 (2)分析控制要求,确定输入/输出设备,绘制I/O接线图 1)要实现小车的左右往复运动,只要对小车的拖动电动机实现正、反转控制即可。这里用两个接触器分别控制小车左行( KM2)和右行(KM1)。 2)系统的启动(左SB2、右SB1)、停止(SB3)需要三个按钮,起点和终点处的两个行程开关是用来自动控制小车往复运动的,也应作为输入设备。 即:SB1-小车右行启动按钮 SB2-小车左行启动按钮 SB3-小车停止按钮 SQ1-左终点行程开关 SQ2-右终点行程开关 (3)典型单元梯形图程序的引入 引入典型单元梯形图程序,小车的左右往复运动控制就是电动机的正、反转控制(软件互锁、硬件互锁),如图6-4所示。
图6-3 控制要求 (2)分析控制要求,确定输入/输出设备,绘制I/O接线图 1)要实现小车的左右往复运动,只要对小车的拖动电动机实现正、反转控制即可。这里用两个接触器分别控制小车左行( KM2)和右行(KM1)。 2)系统的启动(左SB2、右SB1)、停止(SB3)需要三个按钮,起点和终点处的两个行程开关是用来自动控制小车往复运动的,也应作为输入设备。 即:SB1-小车右行启动按钮 SB2-小车左行启动按钮 SB3-小车停止按钮 SQ1-左终点行程开关 SQ2-右终点行程开关 (3)典型单元梯形图程序的引入 引入典型单元梯形图程序,小车的左右往复运动控制就是电动机的正、反转控制(软件互锁、硬件互锁),如图6-4所示。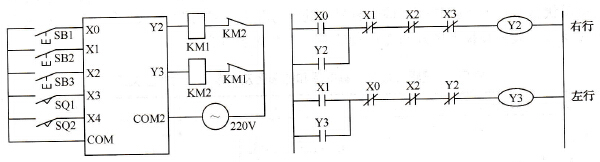 图6-4 电动机的正、反转典型单元梯形图 (4)修改、完善以满足控制要求,如图6-5所示。
图6-4 电动机的正、反转典型单元梯形图 (4)修改、完善以满足控制要求,如图6-5所示。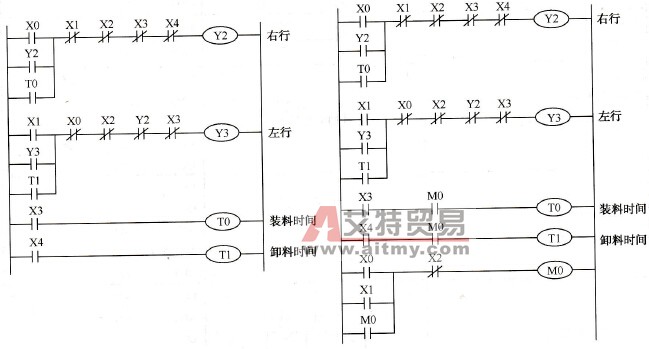 图6-5 完善梯形图 1)小车在两处装料、卸料需要延时,应增加定时器。 2)延时结束,小车要能自动继续左行或右行,应在Y2和Y3线圈前加入定时器的延时触点。 3)小车到达SQ1或SQ2处要能自动停下,应在Y2和Y3线圈前加入相应行程开关的常闭触点。 4)若小车停在SQ1或SQ2处,就算曾经按下停止按钮,小车仍然会自行启动。 解决方法:增加辅助继电器记忆启动信号。
图6-5 完善梯形图 1)小车在两处装料、卸料需要延时,应增加定时器。 2)延时结束,小车要能自动继续左行或右行,应在Y2和Y3线圈前加入定时器的延时触点。 3)小车到达SQ1或SQ2处要能自动停下,应在Y2和Y3线圈前加入相应行程开关的常闭触点。 4)若小车停在SQ1或SQ2处,就算曾经按下停止按钮,小车仍然会自行启动。 解决方法:增加辅助继电器记忆启动信号。

 PLC编程的基本规则
PLC编程的基本规则





