

![]() 来源:艾特贸易2017-06-05
来源:艾特贸易2017-06-05
简介下面说明 PTO/PWM 的初始化及操作步骤,它可以进一步理解 PTO 及 PWM 功能。在整个说明过程中,一直使用 Q0.0 输出。初始化说明假定 PLC 进入运行 (RUN) 进行,即利用特殊继电器 SM0.1 调用
下面说明PTO/PWM的初始化及操作步骤,它可以进一步理解PTO及PWM功能。在整个说明过程中,一直使用Q0.0输出。初始化说明假定PLC进入运行(RUN)进行,即利用特殊继电器SM0.1调用初始化子程序。假如情况与此不符(如需对PTO/PWM功能重置),当然可以利用其他条件调用初始化程序。 ①PWM初始化步骤如下: ·利用SM0.1将输出位(Q0.0)复位,并调用初始化子程序。即随后的扫描周期不再调用该初始化子程序,降低扫描时间的同时,使程序结构化更强。 ·设置控制字节,将控制字写入SMB67(或SMB77)。如16#C1,其意义是,选择并允许PWM方式的工作,以μs为时间基准,允许更新PWM的周期时间。 ·将字型数据的PWM周期值写入SMW68(或SMW78)。 ·将字型数据的PWM的脉冲宽度值写入SMW70(或SMW80)。 ·如果希望随时改变脉冲宽度,可以重新向SMB67装入控制字(16#C2或16#C3)。 ·执行PLS指令,PLC自动对PTO/PWM的硬件做初始化编程。 ·退出子程序。 【例1】 在实验室环境中,验证PWM的功能,控制要求如下: 当CPU从STOP到RUN时,输出点Q0.1立即输出脉冲,要求周期2s,脉宽1s;当输入按钮I0.0按下之后,周期不改变,脉宽改为0.5s。 分析: ·由于实验室的设备以学生练习为目的,其输出类型均为继电器类型(交/直流输出都可连接),同时也为了便于监控和延长使用寿命,周期和脉宽值不要太小(时基应为μs),本例中因为周期和脉宽都以秒为单位,所以时基为ms,如周期2s,则设定值为2000。 ·改变PWM的输出形式,必须通过重新初始化来实现(通过I0.0上升沿来调用重新初始化程序段),在重新初始化的过程中,只需对改变的参数重新赋值,并通过执行PLS指令启动PWM输出按新参数运行。 参考梯形图程序如图4-80所示。 图4-80 PWM应用举例 ②PTO操作的初始化。首先应确定高速脉冲串的输出端子(Q0.0或Q0.1)和脉冲序列的实现方式(单段或多段)。然后再进行PTO的初始化,其过程如下: ·利用SM0.1将输出位(Q0.0或Q0.1)复位,并调用初始化子程序。即随后的扫描周期不再调用该初始化子程序,降低扫描时间的同时,使程序结构化更强。 ·设置控制字节,将控制字写入SMB67或SMB77。 ·如果是单段PTO,则向SMW68或SMW78写入初始周期值,并向SMD72或SMD82写入脉冲个数。 ·如果是多段PTO,则需向SMB166S或MB176写入段数,向SMW168或SMW178装入包络表的首地址(可以子程序的形式建立包络表)。 ·当脉冲序列输出完成时,发出告知信号或触发其他操作时,需将中断事件号19或20和某个中断服务程序相连接(ATCH)。 ·编写中断服务子程序。 ·设置全局开中断。 ·执行PLS指令。 ·退出子程序。 【例2】 多段PTO输出控制应用举例。 某台步进电动机的运行曲线如图4-81所示,需要4000个脉冲,其中需要200个脉冲使电动机从A点加速运行到B点,然后恒速运行3400个脉冲到C点,最后需要400个脉冲减速到D点,这时指示灯Q0.5亮,表示从A点到D点的运行过程结束。
图4-80 PWM应用举例 ②PTO操作的初始化。首先应确定高速脉冲串的输出端子(Q0.0或Q0.1)和脉冲序列的实现方式(单段或多段)。然后再进行PTO的初始化,其过程如下: ·利用SM0.1将输出位(Q0.0或Q0.1)复位,并调用初始化子程序。即随后的扫描周期不再调用该初始化子程序,降低扫描时间的同时,使程序结构化更强。 ·设置控制字节,将控制字写入SMB67或SMB77。 ·如果是单段PTO,则向SMW68或SMW78写入初始周期值,并向SMD72或SMD82写入脉冲个数。 ·如果是多段PTO,则需向SMB166S或MB176写入段数,向SMW168或SMW178装入包络表的首地址(可以子程序的形式建立包络表)。 ·当脉冲序列输出完成时,发出告知信号或触发其他操作时,需将中断事件号19或20和某个中断服务程序相连接(ATCH)。 ·编写中断服务子程序。 ·设置全局开中断。 ·执行PLS指令。 ·退出子程序。 【例2】 多段PTO输出控制应用举例。 某台步进电动机的运行曲线如图4-81所示,需要4000个脉冲,其中需要200个脉冲使电动机从A点加速运行到B点,然后恒速运行3400个脉冲到C点,最后需要400个脉冲减速到D点,这时指示灯Q0.5亮,表示从A点到D点的运行过程结束。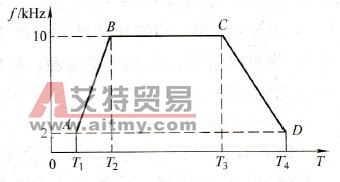 图4-81 步进电动机的运行曲线 ①选择由Q0.0输出,由图4-81可知,选择3段(AB段、BC段和CD段)PTO的输出形式。 ②确定周期值的时基单位,因为在BC段输出的频率最大,为10kHz,对应的周期值为100μs,因此选择时基单位为μs,向控制字节SMB67写入控制字16#A0。 ③确定初始周期值、周期增量值。 ·初始周期值的确定比较容易,是每段初始频率的倒数。AB段为500μs,BC段为100μs,CD段为100μs。 ·周期增量值的确定。周期增量值的确定可通过计算来得到,计算公式为:(Tn+1-Tn)/N,式中,Tn+1为该段结束的周期时间,Tn为该段开始的周期时间,N为该段的脉冲数。 ④建立包络表。设包络表的首地址为VB200,包络表中的参数如表4-37所示。 表4-37 包络表的参数
图4-81 步进电动机的运行曲线 ①选择由Q0.0输出,由图4-81可知,选择3段(AB段、BC段和CD段)PTO的输出形式。 ②确定周期值的时基单位,因为在BC段输出的频率最大,为10kHz,对应的周期值为100μs,因此选择时基单位为μs,向控制字节SMB67写入控制字16#A0。 ③确定初始周期值、周期增量值。 ·初始周期值的确定比较容易,是每段初始频率的倒数。AB段为500μs,BC段为100μs,CD段为100μs。 ·周期增量值的确定。周期增量值的确定可通过计算来得到,计算公式为:(Tn+1-Tn)/N,式中,Tn+1为该段结束的周期时间,Tn为该段开始的周期时间,N为该段的脉冲数。 ④建立包络表。设包络表的首地址为VB200,包络表中的参数如表4-37所示。 表4-37 包络表的参数
V变量存储器地址 参数名称 参数值 VB200 总包络段数 3 VW201 加速阶段 初始周期值 500μs VW203 周期增量值 -2μs VD205 输出脉冲数 200 VW209 恒速阶段 初始周期值 100μs VW211 周期增量值 0μs VD213 输出脉冲数 3400 VW217 减速阶段 初始周期值 100μs VW219 周期增量值 1μS VD221 输出脉冲数 400 ⑤设置中断事件,编写中断服务子程序。当3段PTO输出完成时,对应的中断事件号是19,用中断连接指令将中断事件号19与中断服务子程序INT2连接起来,编写中断服务子程序。 ⑥设置全局开中断ENI。 ⑦执行PLS指令。 步进电动机系统的控制程序如图4-82所示,是由主程序、初始化子程序和中断服务程序构成的。 注意:本程序不宜在实验室环境运行,因为4000个脉冲会在不到1s就会输出完成,这既不便于观察,也会损坏实验设备。如用于实验,应大幅度地减小频率及各段脉冲数。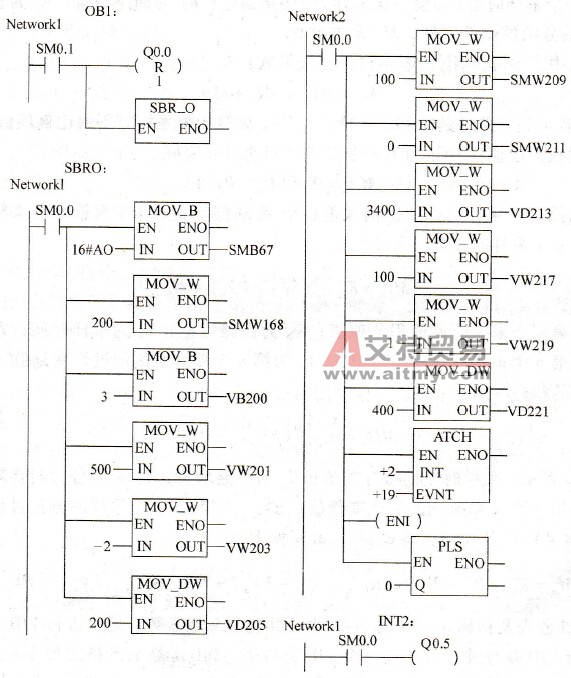 图4-82 步进电动机控制程序
图4-82 步进电动机控制程序

 PLC编程的基本规则
PLC编程的基本规则





