

![]() 来源:艾特贸易2017-06-05
来源:艾特贸易2017-06-05
简介当 PLC 执行 FNC 158 (DRVI) 和 FNC 159(DRVA) 指令使机器运动时,当前位置值会增加或减少,但 PLC 都可以记住这些值,因而也就知道机器的当前位置。但当 PLC 断电时这些数据就丢失了。要对付
 当PLC执行FNC 158 (DRVI)和FNC 159(DRVA)指令使机器运动时,当前位置值会增加或减少,但PLC都可以“记住”这些值,因而也就知道机器的当前位置。但当PLC断电时这些数据就丢失了。要对付这种情况,机器启动时必须执行回原点操作,以校准机械的原点。
当PLC执行FNC 158 (DRVI)和FNC 159(DRVA)指令使机器运动时,当前位置值会增加或减少,但PLC都可以“记住”这些值,因而也就知道机器的当前位置。但当PLC断电时这些数据就丢失了。要对付这种情况,机器启动时必须执行回原点操作,以校准机械的原点。 [S1·]指定回原点速度,16 bit指令时为10~ 32 767Hz,32bit指令时为10~ 100kHz。 [S2·]指定爬行速度,接近点( DOG)信号ON后的低速,10~ 32 767Hz。 [S3·]接近点信号,(常开接点)最好用X,以免受扫描周期影响加大原点误差。 [D·]脉冲输出点,仅限于Y000与Y001,必须用晶体管输出单元。 若在执行FNC 156(ZRN)指令之前使M8140置1,可使PLC在回原点操作完成后向伺服放大器输出清零信号。相应清零信号输出点如下: 1)脉冲输出为Y000时,清零输出为Y002; 2)脉冲输出为Y001时,清零输出为Y003。 清零信号必须以漏型晶体管输出,负载能力大于200mA(也适用于FNC 157、FNC 158)。 若配用三菱公司的MR-H和MR-J2型伺服放大器,则停电时机械可保持其当前位置,而且可用FNC 155((D) ABS)读取机械的绝对位置,所以只需在首次启动时执行回原点操作,以后即使断电后再启动也不必再回原点。 因为不具备DOG搜索功能,所以回原点前机械必须在DOG前方位置。 图4-72所示是回原点指令执行情况说明。
[S1·]指定回原点速度,16 bit指令时为10~ 32 767Hz,32bit指令时为10~ 100kHz。 [S2·]指定爬行速度,接近点( DOG)信号ON后的低速,10~ 32 767Hz。 [S3·]接近点信号,(常开接点)最好用X,以免受扫描周期影响加大原点误差。 [D·]脉冲输出点,仅限于Y000与Y001,必须用晶体管输出单元。 若在执行FNC 156(ZRN)指令之前使M8140置1,可使PLC在回原点操作完成后向伺服放大器输出清零信号。相应清零信号输出点如下: 1)脉冲输出为Y000时,清零输出为Y002; 2)脉冲输出为Y001时,清零输出为Y003。 清零信号必须以漏型晶体管输出,负载能力大于200mA(也适用于FNC 157、FNC 158)。 若配用三菱公司的MR-H和MR-J2型伺服放大器,则停电时机械可保持其当前位置,而且可用FNC 155((D) ABS)读取机械的绝对位置,所以只需在首次启动时执行回原点操作,以后即使断电后再启动也不必再回原点。 因为不具备DOG搜索功能,所以回原点前机械必须在DOG前方位置。 图4-72所示是回原点指令执行情况说明。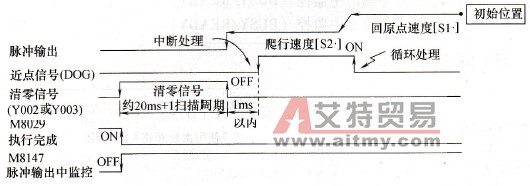 图4-72 回原点指令执行情况
图4-72 回原点指令执行情况

 PLC编程的基本规则
PLC编程的基本规则





