

![]() 来源:艾特贸易2017-06-05
来源:艾特贸易2017-06-05
简介步进电机是一种能将数字输入脉冲转换成旋转或直线增量运动的电磁执行元件。每输入一个脉冲信号就可使步进电机旋转一个固定的角度,这个角度称为步距角。步进电机的输出位移量
步进电机是一种能将数字输入脉冲转换成旋转或直线增量运动的电磁执行元件。每输入一个脉冲信号就可使步进电机旋转一个固定的角度,这个角度称为步距角。步进电机的输出位移量与输入脉冲数成正比,转速与脉冲频率成正比,转向与脉冲分配到步进电机的各相绕组的相序有关。 步进电机与普通电机的使用不同,它是通过步进电机驱动器来驱动的。在图7. 15中,作为控制器的PLC,只要从Y2和Y0输出端分别给驱动器发送两个信号,一个是具有给定频率的脉冲信号,另一个是脉冲方向信号,便可控制步进电机的转动位移、速度和转向了。 1.功能要求 (1)系统设置自动和手动两种工作方式,用丰炜PLC和信捷DSP-565细分驱动器控制二相步进电机来回运动,示意图如图7.11所示。 图7.11 二相步进电机来回运动示意图 (2)设计如图7.12所示的触摸屏人机界面,通过4个触摸屏按钮来控制启停、工作方式和前进与返回。通过数据显示框实时显示当前距离;通过数据输入框对运动参数和步进电机参数进行设置。 ①设置步进电机的前进距离、前进速度和后退速度; ②设置步进电机的直径和步距角,驱动器的细分取125。 (3)按信捷DSP-565驱动器说明,选用能适配的二相步进电机(42、57、85型)。本例采用的是常州宝来电器生产的39BYG703-24二相步进电机,步距为1.8°,电压为12V,电流为0. 31A,轴直径为5mm。
图7.11 二相步进电机来回运动示意图 (2)设计如图7.12所示的触摸屏人机界面,通过4个触摸屏按钮来控制启停、工作方式和前进与返回。通过数据显示框实时显示当前距离;通过数据输入框对运动参数和步进电机参数进行设置。 ①设置步进电机的前进距离、前进速度和后退速度; ②设置步进电机的直径和步距角,驱动器的细分取125。 (3)按信捷DSP-565驱动器说明,选用能适配的二相步进电机(42、57、85型)。本例采用的是常州宝来电器生产的39BYG703-24二相步进电机,步距为1.8°,电压为12V,电流为0. 31A,轴直径为5mm。 图7.12 步进电机控制的触摸屏人机界面 2.PLC与触摸屏选型及存储分配 输出信号只有两个,其地址分配和相关信息如表7.11所示。选择专为运动控制而设计的丰炜VB1-32MT型PLC,为步进电机所要求的晶体管输出型,且支持定位控制指令。 表7.11 步进电机控制输出信号及地址分配
图7.12 步进电机控制的触摸屏人机界面 2.PLC与触摸屏选型及存储分配 输出信号只有两个,其地址分配和相关信息如表7.11所示。选择专为运动控制而设计的丰炜VB1-32MT型PLC,为步进电机所要求的晶体管输出型,且支持定位控制指令。 表7.11 步进电机控制输出信号及地址分配 根据图7. 12的画面选择信捷7英寸256色真彩触摸屏TP760-T。此画面的右部可见的是4个指示灯,其上分别叠放了4个隐形的触摸屏按钮,以充分利用显示屏的可视面积;画面中间部分最上面的1个为数据显示框,其下为5个数据输入框。这些部件的存储分配与属性分别如表7. 12和表7.13所示。按照这两个表中的数据,用信捷触摸屏软件“TouchWin编辑工具”(V2. 89),就可以画出图7.12的人机界面了。 表7.12 图7.12人机界面中按钮与指示灯的存储分配与属性
根据图7. 12的画面选择信捷7英寸256色真彩触摸屏TP760-T。此画面的右部可见的是4个指示灯,其上分别叠放了4个隐形的触摸屏按钮,以充分利用显示屏的可视面积;画面中间部分最上面的1个为数据显示框,其下为5个数据输入框。这些部件的存储分配与属性分别如表7. 12和表7.13所示。按照这两个表中的数据,用信捷触摸屏软件“TouchWin编辑工具”(V2. 89),就可以画出图7.12的人机界面了。 表7.12 图7.12人机界面中按钮与指示灯的存储分配与属性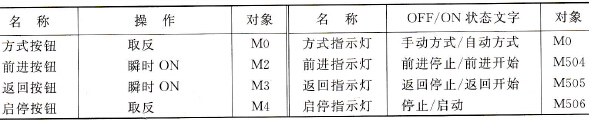 表7.13 图7.12人机界面中数据显示和输入框的存储分配与属性
表7.13 图7.12人机界面中数据显示和输入框的存储分配与属性 3.梯形图程序设计 丰炜VB1-32MT型PLC控制步进电机梯形图如图7.13所示。对程序设计中相关知识和算法作如下说明。 (1)绝对位置控制指令 ①指令格式: DRVA[S1·][S2·][D1·][D2·] ②指令概要如表7. 14所示,示例梯形图如图7.14所示。 表7. 14 脉冲输出指令概要
3.梯形图程序设计 丰炜VB1-32MT型PLC控制步进电机梯形图如图7.13所示。对程序设计中相关知识和算法作如下说明。 (1)绝对位置控制指令 ①指令格式: DRVA[S1·][S2·][D1·][D2·] ②指令概要如表7. 14所示,示例梯形图如图7.14所示。 表7. 14 脉冲输出指令概要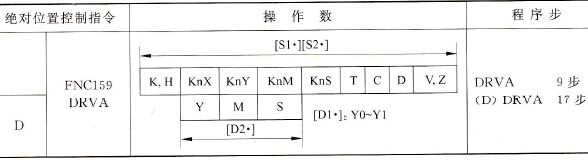
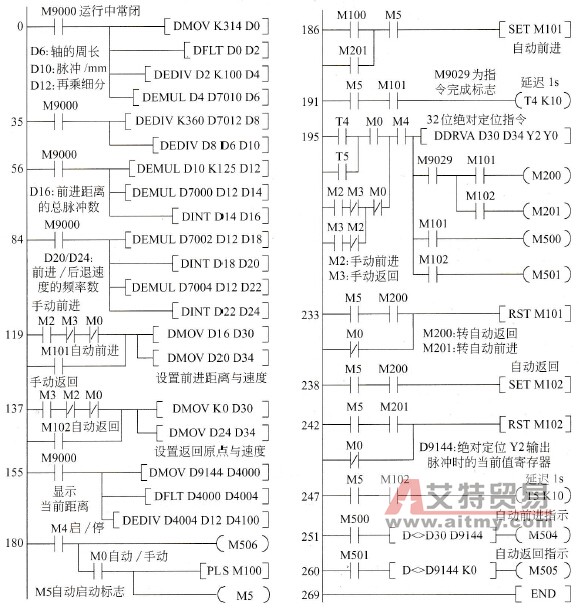 图7.13 丰炜VB1-32MT型PLC控制步进电机梯形图 图7.14所示为32位绝对位置控制指令,丰炜VB1-32MT型PLC支持这条指令,指令执行过程如下。
图7.13 丰炜VB1-32MT型PLC控制步进电机梯形图 图7.14所示为32位绝对位置控制指令,丰炜VB1-32MT型PLC支持这条指令,指令执行过程如下。 图7.14 绝对位置控制指令示例 当M4接通时,Y2输出点以12199 Hz频率输出脉冲,直到当前值寄存器(D9145,D9144)的值与目的位置(D31,D30)中的值相等时,表示到达绝对定位点,Y2停止输出。Y0输出点状态会根据当前位置(D9145,D9144)与目的位置(D31,D30)的比较而改变,当目的位置>当前位置时,Y0为ON,表示正转;当目的位置<当前位置时,Y0为OFF;表示反转。当目的位置到达时,指令完成标志M9029置1-个扫描周期。 要注意与DRVA指令相关的软元件丰炜的与三菱的不同,表7.15为本程序中用到的相关的软元件比较。从表中可见,丰炜VB1型PLC提供了4点高速脉冲输出,可同时执行4个独立轴定位控制。其中: [D1·]=Y0、Y1时,[S2·]=10~20000,即Y0、Y1可输出20kHz以下脉冲; [D1·]=Y2、Y3时,16位指令:[S2·]=10~32767,32位指令:10~200000。即Y2和Y3可输出200kHz以下高速脉冲。 表7.15 丰炜与三菱相关软元件的比较
图7.14 绝对位置控制指令示例 当M4接通时,Y2输出点以12199 Hz频率输出脉冲,直到当前值寄存器(D9145,D9144)的值与目的位置(D31,D30)中的值相等时,表示到达绝对定位点,Y2停止输出。Y0输出点状态会根据当前位置(D9145,D9144)与目的位置(D31,D30)的比较而改变,当目的位置>当前位置时,Y0为ON,表示正转;当目的位置<当前位置时,Y0为OFF;表示反转。当目的位置到达时,指令完成标志M9029置1-个扫描周期。 要注意与DRVA指令相关的软元件丰炜的与三菱的不同,表7.15为本程序中用到的相关的软元件比较。从表中可见,丰炜VB1型PLC提供了4点高速脉冲输出,可同时执行4个独立轴定位控制。其中: [D1·]=Y0、Y1时,[S2·]=10~20000,即Y0、Y1可输出20kHz以下脉冲; [D1·]=Y2、Y3时,16位指令:[S2·]=10~32767,32位指令:10~200000。即Y2和Y3可输出200kHz以下高速脉冲。 表7.15 丰炜与三菱相关软元件的比较 三菱DRVA指令中脉冲输出仅限Y0和Y1,[S2·]指定的输出脉冲频率必须小于最高频率(D8147,D8146),设定范围为10~100000,即Y0和Y1只可输出100kHz以下脉冲。 (2)步进电机的计算 程序中要计算对应前进距离的最大脉冲数和对应前进和返回速度的脉冲频率上限,分别作为DDRVA指令中的[S1·]和[S2·]的值,依据公式如下:
三菱DRVA指令中脉冲输出仅限Y0和Y1,[S2·]指定的输出脉冲频率必须小于最高频率(D8147,D8146),设定范围为10~100000,即Y0和Y1只可输出100kHz以下脉冲。 (2)步进电机的计算 程序中要计算对应前进距离的最大脉冲数和对应前进和返回速度的脉冲频率上限,分别作为DDRVA指令中的[S1·]和[S2·]的值,依据公式如下: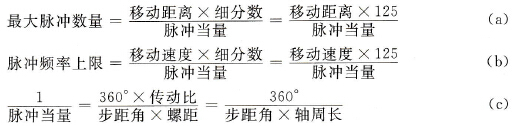 (a)和(b)式中取细分数为125。(c)式中,取传动比=1,螺距=轴周长;1/脉冲当量的单位是:脉冲/mm,其含义是电机移动1mm所需要的脉冲数。将计算出的1/脉冲当量的值代入(a)和(b)式中,就可以计算出DDRVA指令中的[S1·]和[S2·]的值了。 上述算法在本梯形图中的实现说明如下(用到的D7000~D7012的含义见表7.13)。 ①0步梯级:将浮点数3. 14乘以D7010中轴的直径得到轴的周长D6。 ②35步梯级:按公式(c)计算出脉冲1mm的值D10,D7012中是步距角的值。 ③56步梯级:按公式(a)计算出对应前进距离(D7000)的总脉冲数的值D16。 ④84步梯级:按公式(b)分别计算出对应前进和返回速度(D7002和D7004)的脉冲频率值D20和D24。 (3)手动和自动的工作过程 ①手动工作过程:当只按下启动按钮,由图7.13中的180步梯级可知,M4常开接通,使M506线圈得电,指示系统处于启动状态。而M0常开是断开的,为手动方式。这时,若按下前进按钮,M2常开接通,119步梯级设置前进距离和速度,195步梯级执行绝对定位指令而驱动电机前进;若按下返回按钮,M3接通,137步梯级设置返回原点和速度,195步梯级执行绝对定位指令而驱动电机返回原点。 ②自动工作过程:当启动按钮和自动按钮都按下时,由图7. 13中的180步梯级可知,自动标志M506线圈和自动启动标志M5线圈均得电,M100产生一个扫描周期的脉冲。在此脉冲驱动下,程序将按照触摸屏中输入的运动参数开始自动执行电机前进和返回的循环运动,过程如下:
(a)和(b)式中取细分数为125。(c)式中,取传动比=1,螺距=轴周长;1/脉冲当量的单位是:脉冲/mm,其含义是电机移动1mm所需要的脉冲数。将计算出的1/脉冲当量的值代入(a)和(b)式中,就可以计算出DDRVA指令中的[S1·]和[S2·]的值了。 上述算法在本梯形图中的实现说明如下(用到的D7000~D7012的含义见表7.13)。 ①0步梯级:将浮点数3. 14乘以D7010中轴的直径得到轴的周长D6。 ②35步梯级:按公式(c)计算出脉冲1mm的值D10,D7012中是步距角的值。 ③56步梯级:按公式(a)计算出对应前进距离(D7000)的总脉冲数的值D16。 ④84步梯级:按公式(b)分别计算出对应前进和返回速度(D7002和D7004)的脉冲频率值D20和D24。 (3)手动和自动的工作过程 ①手动工作过程:当只按下启动按钮,由图7.13中的180步梯级可知,M4常开接通,使M506线圈得电,指示系统处于启动状态。而M0常开是断开的,为手动方式。这时,若按下前进按钮,M2常开接通,119步梯级设置前进距离和速度,195步梯级执行绝对定位指令而驱动电机前进;若按下返回按钮,M3接通,137步梯级设置返回原点和速度,195步梯级执行绝对定位指令而驱动电机返回原点。 ②自动工作过程:当启动按钮和自动按钮都按下时,由图7. 13中的180步梯级可知,自动标志M506线圈和自动启动标志M5线圈均得电,M100产生一个扫描周期的脉冲。在此脉冲驱动下,程序将按照触摸屏中输入的运动参数开始自动执行电机前进和返回的循环运动,过程如下: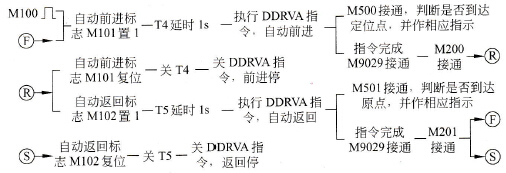 4.接线图 丰炜VB1-32MT型PLC步进电机控制接线图如图7.15所示。对各部件作如下说明。
4.接线图 丰炜VB1-32MT型PLC步进电机控制接线图如图7.15所示。对各部件作如下说明。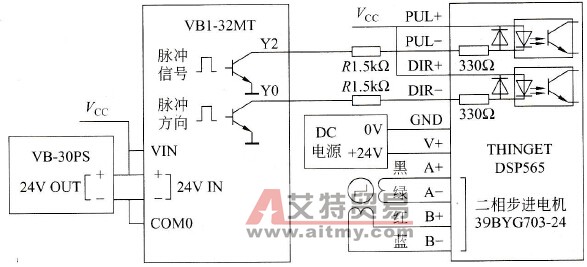 图7.15 丰炜PLC步进电机控制接线图 (1)丰炜VB1-32MT-D型PLC 这个型号的PLC为NPN晶体管输出,DC24V供电,适配的电源是VB-30PS。配线时要按图7. 15所示将此电源的24V OUT的正负输出端与主机的24V IN的正负输出端以及VIN、COM0端子分别对应相连。 VB1与TP760-T触摸屏之间的连接如图7.16所示。此连接线可由丰炜提供,也可自行按图制作,但不能使用VB1与PC相连的那根连接线MWPC-200,否则将会引起通信错误。
图7.15 丰炜PLC步进电机控制接线图 (1)丰炜VB1-32MT-D型PLC 这个型号的PLC为NPN晶体管输出,DC24V供电,适配的电源是VB-30PS。配线时要按图7. 15所示将此电源的24V OUT的正负输出端与主机的24V IN的正负输出端以及VIN、COM0端子分别对应相连。 VB1与TP760-T触摸屏之间的连接如图7.16所示。此连接线可由丰炜提供,也可自行按图制作,但不能使用VB1与PC相连的那根连接线MWPC-200,否则将会引起通信错误。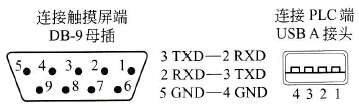 图7.16 VB1与TP760-T触摸屏之间的连接 (2)信捷DSP-565细分驱动器 DSP-565为二相细分型步进电机驱动器,细分动态可调达128,能驱动5.6A以下二相混合式4、6、8线步进电机。下面说明强电接口和控制信号接口的连接。 ①强电接口的连接 V+和GND是驱动器的电源输入端,其供电电压范围在20~48V之间。图中用DC24V电源供电。驱动器的A+、A-和B+、B-输出端分别和步进电机(39BYG703-24)A、B相线圈相连。 ②控制信号接口的连接 PUL+、PUL-为驱动器的脉冲控制信号输入端,DIR+、DIR-为驱动器的脉冲方向控制信号输入端。PLC的Y2和Y0输出端分别通过电阻R与PUL-和DIR-相连,PUL+和DIR+都与Vcc相连,这样,PLC的输出与驱动器的输入之间构成了一种集电极开路的共阳极的接法电路。电阻R的值与Vcc的关系如表7.16所示,图中Vcc与VB-30PS的+24V相连,所以R为1.5kΩ。驱动器本身的输入电源与Vcc的供电电源最好是分开的。 表7.16 电阻R的值与Vcc的关系
图7.16 VB1与TP760-T触摸屏之间的连接 (2)信捷DSP-565细分驱动器 DSP-565为二相细分型步进电机驱动器,细分动态可调达128,能驱动5.6A以下二相混合式4、6、8线步进电机。下面说明强电接口和控制信号接口的连接。 ①强电接口的连接 V+和GND是驱动器的电源输入端,其供电电压范围在20~48V之间。图中用DC24V电源供电。驱动器的A+、A-和B+、B-输出端分别和步进电机(39BYG703-24)A、B相线圈相连。 ②控制信号接口的连接 PUL+、PUL-为驱动器的脉冲控制信号输入端,DIR+、DIR-为驱动器的脉冲方向控制信号输入端。PLC的Y2和Y0输出端分别通过电阻R与PUL-和DIR-相连,PUL+和DIR+都与Vcc相连,这样,PLC的输出与驱动器的输入之间构成了一种集电极开路的共阳极的接法电路。电阻R的值与Vcc的关系如表7.16所示,图中Vcc与VB-30PS的+24V相连,所以R为1.5kΩ。驱动器本身的输入电源与Vcc的供电电源最好是分开的。 表7.16 电阻R的值与Vcc的关系

 PLC编程的基本规则
PLC编程的基本规则





