

![]() 来源:艾特贸易2017-06-05
来源:艾特贸易2017-06-05
简介机械手臂控制系统如图 7-17 所示。它的主要功能是实现工件的搬运,是一个水平/垂直位移的机械设备。该系统是集控制,检测一执行于一体的综合性装置。 图 7-17 机械手臂控制系统
机械手臂控制系统如图7-17所示。它的主要功能是实现工件的搬运,是一个水平/垂直位移的机械设备。该系统是集控制,检测一执行于一体的综合性装置。 图7-17 机械手臂控制系统 1.控制要求 机械手臂的全部动作由气缸驱动,汽缸由相应的电磁阀控制。具体功能要求如下: 1)工件的补充使用人工控制,可直接将工件放在D点(LS0动作)。 2)只要D点有工件,机械手臂即先下降(B缸动作)将工件抓取(C缸动作)后上升(B缸复位),再将工件搬运(A缸动作)到E点上方,机械手臂再次下降(B缸动作)后放开(C缸复位)工件,机械手臂上升(B缸复位),最后机械手臂再回到原点(A缸复位)。 3)A、B、C缸均为单作用气缸,使用电磁控制。 4)C缸在抓取或放开工件后,都需有1s的间隔,机械手臂才能动作。 5)当,E点有工件且B缸已上升到LS4时,传送带电动机转动以运走工件,经2s后传送带电动机自动停止。工件未完全运走(计时未到)时,则应等待传送带电动机停止后再将工件移走。 6) LS0→D点有无工件侦测用限制开关 LS1→A缸前行限制开关(左极限) LS2→A缸退回限制开关(右极限) LS3→B缸下降限制开关(下极限) LS4→B缸上升限制开关(上极限) LS5→E点有无工件侦测用限制开关 2.功能分析 1)原点复位:选定以A缸退回至右极限位置( LS2 ON)、B缸上升至上极限位置( LS4 ON)及C缸松开为机械手臂的原点。执行一个动作之后,应做原点复位的侦测(因为A、B、C缸均为单作用气缸,所以会自动退回原点)。 2)工件搬运流程:依题意其动作为一循环式单一顺序流程。 3)传送带流程:在侦测到E点有工件且B缸在上极限位置时,应驱动传送带转动。 4)上述两个流程可以同时进行,因此使用并进分支流程来完成组合。 3.元件分配 D点工件传感器LS0,使用输入继电器X0;A缸左限位传感器LS1,使用输入继电器X1。 A缸右限位传感器LS2,使用输入继电器X2;B缸下限位传感器LS3,使用输入继电器X3。 B缸上限位传感器LS4,使用输入继电器X4;E点工件传感器LS5,使用输入继电器X5。 A缸驱动,使用输出继电器Y0;B缸驱动,使用输出继电器Y1。 C缸驱动,使用输出继电器Y2;传送带驱动,使用输出继电器Y3。 元件分配图如图7-18所示。 4.绘制状态流程图 1)原点复位流程图如图7-19所示。 2)工件搬运流程图如图7-20所示。
图7-17 机械手臂控制系统 1.控制要求 机械手臂的全部动作由气缸驱动,汽缸由相应的电磁阀控制。具体功能要求如下: 1)工件的补充使用人工控制,可直接将工件放在D点(LS0动作)。 2)只要D点有工件,机械手臂即先下降(B缸动作)将工件抓取(C缸动作)后上升(B缸复位),再将工件搬运(A缸动作)到E点上方,机械手臂再次下降(B缸动作)后放开(C缸复位)工件,机械手臂上升(B缸复位),最后机械手臂再回到原点(A缸复位)。 3)A、B、C缸均为单作用气缸,使用电磁控制。 4)C缸在抓取或放开工件后,都需有1s的间隔,机械手臂才能动作。 5)当,E点有工件且B缸已上升到LS4时,传送带电动机转动以运走工件,经2s后传送带电动机自动停止。工件未完全运走(计时未到)时,则应等待传送带电动机停止后再将工件移走。 6) LS0→D点有无工件侦测用限制开关 LS1→A缸前行限制开关(左极限) LS2→A缸退回限制开关(右极限) LS3→B缸下降限制开关(下极限) LS4→B缸上升限制开关(上极限) LS5→E点有无工件侦测用限制开关 2.功能分析 1)原点复位:选定以A缸退回至右极限位置( LS2 ON)、B缸上升至上极限位置( LS4 ON)及C缸松开为机械手臂的原点。执行一个动作之后,应做原点复位的侦测(因为A、B、C缸均为单作用气缸,所以会自动退回原点)。 2)工件搬运流程:依题意其动作为一循环式单一顺序流程。 3)传送带流程:在侦测到E点有工件且B缸在上极限位置时,应驱动传送带转动。 4)上述两个流程可以同时进行,因此使用并进分支流程来完成组合。 3.元件分配 D点工件传感器LS0,使用输入继电器X0;A缸左限位传感器LS1,使用输入继电器X1。 A缸右限位传感器LS2,使用输入继电器X2;B缸下限位传感器LS3,使用输入继电器X3。 B缸上限位传感器LS4,使用输入继电器X4;E点工件传感器LS5,使用输入继电器X5。 A缸驱动,使用输出继电器Y0;B缸驱动,使用输出继电器Y1。 C缸驱动,使用输出继电器Y2;传送带驱动,使用输出继电器Y3。 元件分配图如图7-18所示。 4.绘制状态流程图 1)原点复位流程图如图7-19所示。 2)工件搬运流程图如图7-20所示。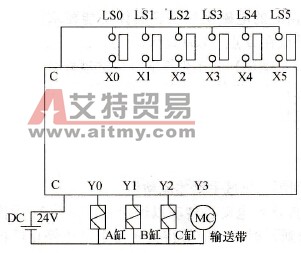
图7-18 元件分配图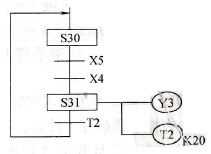
图7-19 原点复位流程图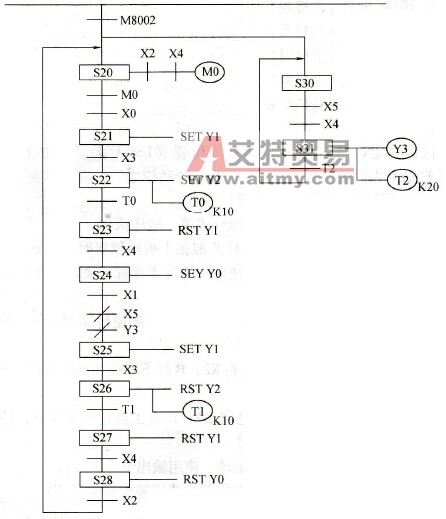 图7-20 工件搬运流程 3)转换为步进阶梯图如图7-21所示。
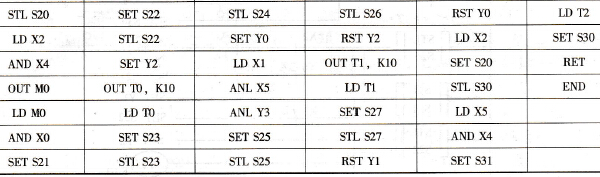
图7-20 工件搬运流程 3)转换为步进阶梯图如图7-21所示。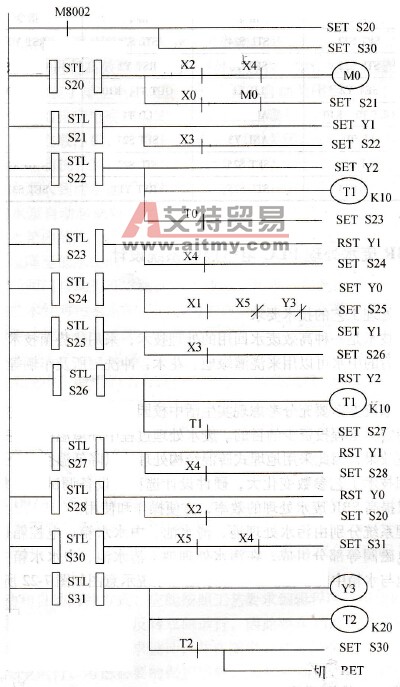 图7-21 步进阶梯图 5.程序清单 程序清单见表7-8。 表7-8 程序清单表
图7-21 步进阶梯图 5.程序清单 程序清单见表7-8。 表7-8 程序清单表

 PLC编程的基本规则
PLC编程的基本规则





