

![]() 来源:艾特贸易2017-06-05
来源:艾特贸易2017-06-05
简介PID 指令的编号为 FNC88 ,如图 6-36 所示源操作数 [S1] 、 [S2] 、 [S3] 和目标操作数 [D] 均为数据寄存器 D , 16 位指令,占 9 个程序步。 [S1] 和 [S2] 分别用来存放给定值 SV 和当前测量到的反
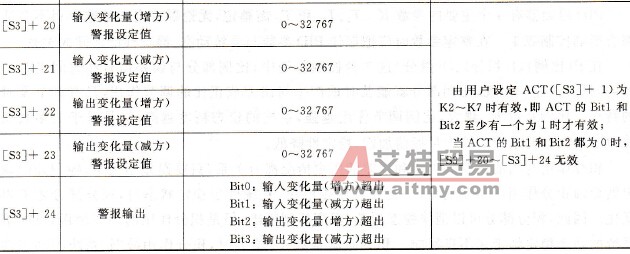
PID指令的编号为FNC88,如图6-36所示源操作数[S1]、[S2]、[S3]和目标操作数[D]均为数据寄存器D,16位指令,占9个程序步。[S1]和[S2]分别用来存放给定值SV和当前测量到的反馈值PV,[S3]~[S3]+6用来存放控制参数的值,运算结果MV存放在[D]中。源操作数[S3]占用从[S3]开始的25个数据寄存器。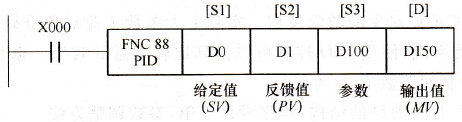 图6-36 PID指令 PID指令是用来调用PID运算程序,在PID运算开始之前,应使用MOV指令将参数(见表6-3)设定值预先写入对应的数据寄存器中。如果使用有断电保持功能的数据寄存器,不需要重复写入。如果目标操作数[D]有断电保持功能,应使用初始化脉冲M8002的常开触点将其复位。 表6-3 PID控制参数及设定
图6-36 PID指令 PID指令是用来调用PID运算程序,在PID运算开始之前,应使用MOV指令将参数(见表6-3)设定值预先写入对应的数据寄存器中。如果使用有断电保持功能的数据寄存器,不需要重复写入。如果目标操作数[D]有断电保持功能,应使用初始化脉冲M8002的常开触点将其复位。 表6-3 PID控制参数及设定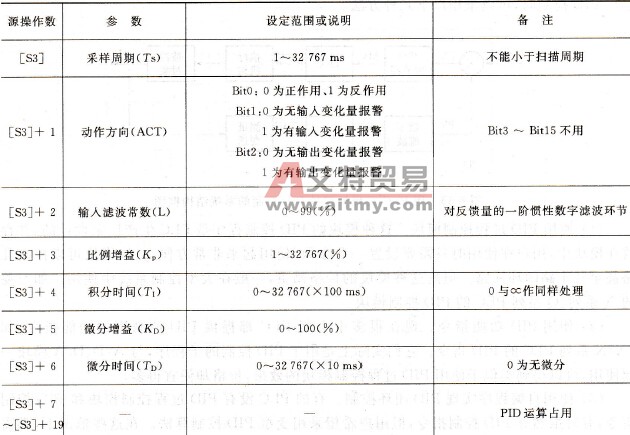
 PID指令可以同时多次使用,但是用于运算的[S3]、[D]的数据寄存器元件号不能重复。 PID指令可以在定时中断、子程序、步进指令和转移指令内使用,但是应将[S3]+7清零(采用脉冲执行的MOV指令)之后才能使用。 控制参数的设定和PID运算中的数据出现错误时,“运算错误”标志M8067为ON,错误代码存放在D8067中。 PID指令采用增量式PID算法,控制算法中还综合使用了反馈量一阶惯性数字滤波、不完全微分和反馈量微分等措施,使该指令比普通的PID算法具有更好的控制效果。 PID控制是根据“动作方向”([S3]+1)的设定内容,进行正作用或反作用的PID运算。PID运算公式如下:
PID指令可以同时多次使用,但是用于运算的[S3]、[D]的数据寄存器元件号不能重复。 PID指令可以在定时中断、子程序、步进指令和转移指令内使用,但是应将[S3]+7清零(采用脉冲执行的MOV指令)之后才能使用。 控制参数的设定和PID运算中的数据出现错误时,“运算错误”标志M8067为ON,错误代码存放在D8067中。 PID指令采用增量式PID算法,控制算法中还综合使用了反馈量一阶惯性数字滤波、不完全微分和反馈量微分等措施,使该指令比普通的PID算法具有更好的控制效果。 PID控制是根据“动作方向”([S3]+1)的设定内容,进行正作用或反作用的PID运算。PID运算公式如下: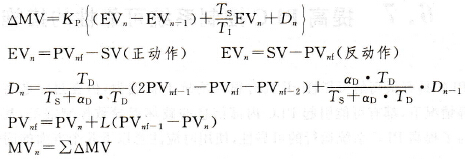 式中:△MV——本次和上一次采样时PID输出量的差值,MVn是本次的PID输出量; EVn和EVn-1——本次和上一次采样时的误差,SV是设定值; PVn——本次采样的反馈值,PVnf、PVnf-1和PVnf-2分别是本次、前一次和前两次滤波 后的反馈值; L——惯性数字滤波的系数; Dn和Dn-1——本次和上一次采样时的微分部分; Kp一一比例增益; Ts——采样周期; T1和TD一一积分时间和微分时间,αD是不完全微分的滤波时间常数与微分时间TD 的比值。
式中:△MV——本次和上一次采样时PID输出量的差值,MVn是本次的PID输出量; EVn和EVn-1——本次和上一次采样时的误差,SV是设定值; PVn——本次采样的反馈值,PVnf、PVnf-1和PVnf-2分别是本次、前一次和前两次滤波 后的反馈值; L——惯性数字滤波的系数; Dn和Dn-1——本次和上一次采样时的微分部分; Kp一一比例增益; Ts——采样周期; T1和TD一一积分时间和微分时间,αD是不完全微分的滤波时间常数与微分时间TD 的比值。

 PLC编程的基本规则
PLC编程的基本规则





