

![]() 来源:艾特贸易2017-06-05
来源:艾特贸易2017-06-05
简介F355 (PID) 是 PID 运算指令,其功能是根据 (S) ~ (S+2) 、 (S+4) ~ (S+10) 指定的模式和参数进行 PID 运算,将运算结果存放在 (S+3) 中, (S+11) ~ (S+30) 为 PID 运算指令的工作区,指令形式及操作
F355 (PID)是PID运算指令,其功能是根据(S)~(S+2)、(S+4)~(S+10)指定的模式和参数进行PID运算,将运算结果存放在(S+3)中,(S+11)~(S+30)为PID运算指令的工作区,指令形式及操作数类型如表4-147所示。 表4-147 指令格式及操作数范围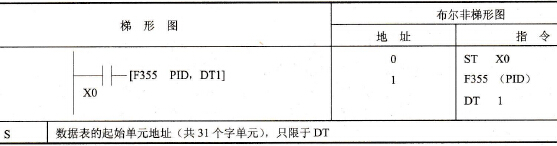 微分或比例.微分的控制功能可通过PID的处理模式来选择,实际的PID参数(比例增益、微分时间和积分时间)及控制功能在参数表中进行设定,参数表如表4-148所示。 表4-148 F355 (PID)的参数表
微分或比例.微分的控制功能可通过PID的处理模式来选择,实际的PID参数(比例增益、微分时间和积分时间)及控制功能在参数表中进行设定,参数表如表4-148所示。 表4-148 F355 (PID)的参数表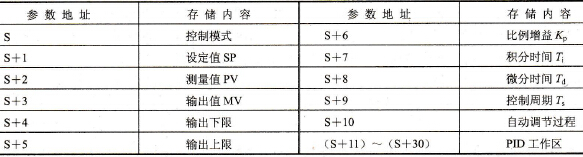 S中设定的控制模式用于选择PID控制的类型和自动调节作用的开或关,具体的参数设置如表4-149所示,相关的参数设定及功能说明如下。 表4-149 PID的模式设定
S中设定的控制模式用于选择PID控制的类型和自动调节作用的开或关,具体的参数设置如表4-149所示,相关的参数设定及功能说明如下。 表4-149 PID的模式设定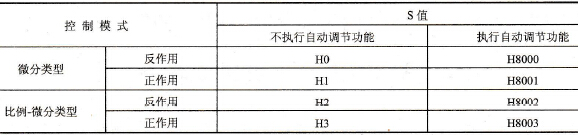 ①控制模式(S)如表4-149所示,控制模式有自动调节和非自动调节两种类型,每一种类型又分为四种情况,对应于8个不同的参数设置。在自动调节模式下,PID作用的最优参数Kp、Ti和Td通过对系统响应的测量而得到。 参数中的正作用和反作用设置用于确定当对象参数变化时输出是增大还是减小。正作用表示在测量值增大时输出也增大(如冷却),反作用表示在测量值增大时输出减小(如加热)。 微分类型和比例.微分类型用来确定在设定值变化时输出的变化。微分类型通常是当设定值变化时输出变化也大,相应地系统就收敛得快,而比例,微分类型则是当设定值变化时输出变化得小,相应地系统就收敛得慢。 ②设定值SP (S+1)设定值单元(S+1)用于设置控制的目标值,范围是K0~K10000。 ③测量值PV (S+2)测量值单元(S+2)用于输入控制对象当前输出参数测量值的A/D结果,范围是K0~K10000。 ④输出值MV (S+3)输出值单元(S+3)用于存储PID结果,一般由D/A转换器或其他功能模块将数字量转换成模拟量并传送给执行机构,范围是K0~K10000。 ⑤输出下限(S+4)输出下限单元(S+4)用于设定输出的最小值,要小于输出上限,范围是K0~K9999。 ⑥输出上限(S+5)输出上限单元(S+5)用于设定输出的最大值,要大于输出下限,范围是K1~K10000。对应的参数要满足“0<输出下限<输出上限≤10000”的关系。 ⑦比例增益Kp (S+6) 比例增益单元(S+6)用于设定PID处理的比例系数,实际的比例增益为“设定值×0.1”,设定值范围是K1~K9999,对应的比例系数是0.1~999.9。如果在控制模式中选择了自动调节作用,设定值将被自动调整并存储在(S+6)中。 ⑧积分时间Ti(S+7)积分时间单元(S+7)用于设定积分作用的系数(积分时间),实际的积分时间为“设定值×0.1”,设定值范围是K1~K30000,对应的积分时间是0.1~3000s。若将积分时间Ti设置为0,则控制规律中没有积分作用。如果在控制模式中选择了自动调节作用,设定值将被自动调整并存储在(S+7)中。 ⑨微分时间Td(S+8)微分时间单元(S+8)用于设定微分作用的系数(微分时间),实际的微分时间为“设定值×0.1”,设定值范围是K1~K10000,对应的微分时间是0.1~1000s。如果在控制模式中选择了自动调节作用,设定值将被自动调整并存储在(S+8)中。 ⑩控制周期Ts(S+9)控制周期单元(S+9)用于设定PID的处理周期,实际的控制周期为“设定值×0.01”,设定值范围是K1~K6000,对应的控制周期是0.01~60s。 ⑪自动调节的进程(S+10) 自动调节的进程单元(S+10)用于存储自动调节作用当前所处的具体阶段,默认值为K0,对应的参数范围是K1~K5,表示自动调节作用分为5个阶段,在自动调节作用结束时返回默认值K0。 ⑫PID工作区(S+11)~(S+30) PID工作区是PLC在执行PID运算时要占用的寄存器,共20个单元。 在使用PID指令时要注意相应参数的存储单元不能和其他指令的存储单元重叠,并且该指令不能在中断程序中。关于PID控制的详细内容请参阅自动控制理论的有关书籍。
①控制模式(S)如表4-149所示,控制模式有自动调节和非自动调节两种类型,每一种类型又分为四种情况,对应于8个不同的参数设置。在自动调节模式下,PID作用的最优参数Kp、Ti和Td通过对系统响应的测量而得到。 参数中的正作用和反作用设置用于确定当对象参数变化时输出是增大还是减小。正作用表示在测量值增大时输出也增大(如冷却),反作用表示在测量值增大时输出减小(如加热)。 微分类型和比例.微分类型用来确定在设定值变化时输出的变化。微分类型通常是当设定值变化时输出变化也大,相应地系统就收敛得快,而比例,微分类型则是当设定值变化时输出变化得小,相应地系统就收敛得慢。 ②设定值SP (S+1)设定值单元(S+1)用于设置控制的目标值,范围是K0~K10000。 ③测量值PV (S+2)测量值单元(S+2)用于输入控制对象当前输出参数测量值的A/D结果,范围是K0~K10000。 ④输出值MV (S+3)输出值单元(S+3)用于存储PID结果,一般由D/A转换器或其他功能模块将数字量转换成模拟量并传送给执行机构,范围是K0~K10000。 ⑤输出下限(S+4)输出下限单元(S+4)用于设定输出的最小值,要小于输出上限,范围是K0~K9999。 ⑥输出上限(S+5)输出上限单元(S+5)用于设定输出的最大值,要大于输出下限,范围是K1~K10000。对应的参数要满足“0<输出下限<输出上限≤10000”的关系。 ⑦比例增益Kp (S+6) 比例增益单元(S+6)用于设定PID处理的比例系数,实际的比例增益为“设定值×0.1”,设定值范围是K1~K9999,对应的比例系数是0.1~999.9。如果在控制模式中选择了自动调节作用,设定值将被自动调整并存储在(S+6)中。 ⑧积分时间Ti(S+7)积分时间单元(S+7)用于设定积分作用的系数(积分时间),实际的积分时间为“设定值×0.1”,设定值范围是K1~K30000,对应的积分时间是0.1~3000s。若将积分时间Ti设置为0,则控制规律中没有积分作用。如果在控制模式中选择了自动调节作用,设定值将被自动调整并存储在(S+7)中。 ⑨微分时间Td(S+8)微分时间单元(S+8)用于设定微分作用的系数(微分时间),实际的微分时间为“设定值×0.1”,设定值范围是K1~K10000,对应的微分时间是0.1~1000s。如果在控制模式中选择了自动调节作用,设定值将被自动调整并存储在(S+8)中。 ⑩控制周期Ts(S+9)控制周期单元(S+9)用于设定PID的处理周期,实际的控制周期为“设定值×0.01”,设定值范围是K1~K6000,对应的控制周期是0.01~60s。 ⑪自动调节的进程(S+10) 自动调节的进程单元(S+10)用于存储自动调节作用当前所处的具体阶段,默认值为K0,对应的参数范围是K1~K5,表示自动调节作用分为5个阶段,在自动调节作用结束时返回默认值K0。 ⑫PID工作区(S+11)~(S+30) PID工作区是PLC在执行PID运算时要占用的寄存器,共20个单元。 在使用PID指令时要注意相应参数的存储单元不能和其他指令的存储单元重叠,并且该指令不能在中断程序中。关于PID控制的详细内容请参阅自动控制理论的有关书籍。

 PLC编程的基本规则
PLC编程的基本规则





