您现在的位置是:首页 > PLC技术 > PLC技术
S7-200 PLC PID指令编程举例
![]() 来源:艾特贸易2017-06-05
来源:艾特贸易2017-06-05
简介某水箱需要维持一定的水位,该水箱里的水以变化的速度流出。这就需要有一个水泵以变化的速度给水箱供水以维持水位不变,水位始终保持在水满时的一半,这样才能使水箱不断水。
某水箱需要维持一定的水位,该水箱里的水以变化的速度流出。这就需要有一个水泵以变化的速度给水箱供水以维持水位不变,水位始终保持在水满时的一半,这样才能使水箱不断水。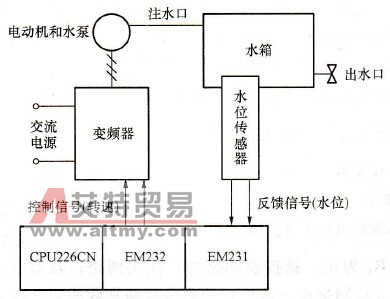 图3-125 水箱的水位控制原理图 (1)分析。本系统的给定值是水箱满水位的50%时的水位,过程变量由水位测量仪提供,输出值是水泵的速度,可以从允许的最大值的0~100%之间变化。 给定值可以预先设定后直接输入到回路表中,过程变量值是来自水位测量仪的单极性模拟量,回路输出值也是一个单极性模拟量,用来控制水泵速度。用PLC作为控制器,用EM2 31为模拟量输入模块测量水位信号,用EM232输出信号,控制变频器,从而控制水泵的输出流量。水箱的水位控制原理图如图3 - 125所示,接线图如图3 - 126所示。 (2)程序实现。本系统采用比例和积分控制,其回路增益和时间常数可以通过工程计算初步确定,但还需要进一步调整以达到最优控制效果。初步确定回路的控制参数为:Kc =0.25,Ts=0. 1s,TI=30min, TD=0。 系统主要软硬件配置如下:
图3-125 水箱的水位控制原理图 (1)分析。本系统的给定值是水箱满水位的50%时的水位,过程变量由水位测量仪提供,输出值是水泵的速度,可以从允许的最大值的0~100%之间变化。 给定值可以预先设定后直接输入到回路表中,过程变量值是来自水位测量仪的单极性模拟量,回路输出值也是一个单极性模拟量,用来控制水泵速度。用PLC作为控制器,用EM2 31为模拟量输入模块测量水位信号,用EM232输出信号,控制变频器,从而控制水泵的输出流量。水箱的水位控制原理图如图3 - 125所示,接线图如图3 - 126所示。 (2)程序实现。本系统采用比例和积分控制,其回路增益和时间常数可以通过工程计算初步确定,但还需要进一步调整以达到最优控制效果。初步确定回路的控制参数为:Kc =0.25,Ts=0. 1s,TI=30min, TD=0。 系统主要软硬件配置如下: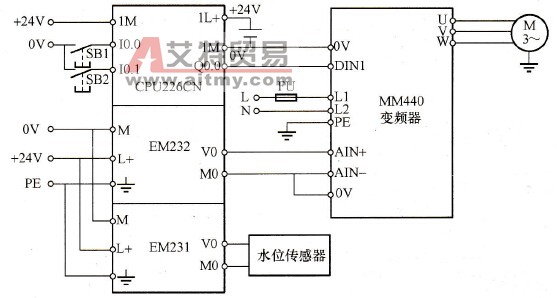 图3-126 水箱的水位控制系统接线图 1)一套STEP7 - Micro/WINV4.0软件; 2)一台CPU 226CN; 3)一台EM231; 4)一台EM232; 5)一根编程电缆(或者CP5 611卡); 6)一台供水设备。 变频器的几个关键参数设定如下:命令源:P0700=2,由端子排输入;数字输入1:P0701=1,接通正转;频率源:P1000=2.模拟量调速。 水位传感器经过A/D转换后的数值,再经过标准化后就是过程变量PVn。执行PID运算的输出值是%,经过变换后,再经过D/A变换,变换为变频器的调速信号。水箱的水位控制PID参数表如表3 - 30所示。 表3 - 30 水箱的水位控制PID参数表
图3-126 水箱的水位控制系统接线图 1)一套STEP7 - Micro/WINV4.0软件; 2)一台CPU 226CN; 3)一台EM231; 4)一台EM232; 5)一根编程电缆(或者CP5 611卡); 6)一台供水设备。 变频器的几个关键参数设定如下:命令源:P0700=2,由端子排输入;数字输入1:P0701=1,接通正转;频率源:P1000=2.模拟量调速。 水位传感器经过A/D转换后的数值,再经过标准化后就是过程变量PVn。执行PID运算的输出值是%,经过变换后,再经过D/A变换,变换为变频器的调速信号。水箱的水位控制PID参数表如表3 - 30所示。 表3 - 30 水箱的水位控制PID参数表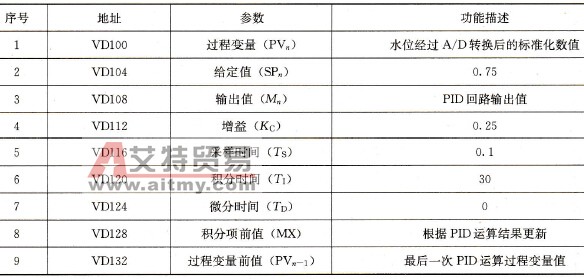 系统启动时关闭出水口,用手动方式控制水泵速度使水位达到满水位的75%,然后打开出水口,同时水泵控制从手动转到自动方式。这个切换可由一个手动开关控制。I0.0控制PID指令的启动,只需提供一个上升沿,I0.0为1时,为系统自动运行状态。 本程序的主程序、回路表初始化程序SBR_ 0、初始化子程序SBR_ 1和中断程序INT_ 0以及对应的语句表如图3 - 127所示。其中在SBR_ 0子程序中进行PID参数设置及定时中断服务子程序的启动,在定时中断服务子程序INT_ 0中进行数据的标准化、PID指令的执行及控制量的输出模拟量输入通道为AIW0,模拟量输出通道为AQW0。
系统启动时关闭出水口,用手动方式控制水泵速度使水位达到满水位的75%,然后打开出水口,同时水泵控制从手动转到自动方式。这个切换可由一个手动开关控制。I0.0控制PID指令的启动,只需提供一个上升沿,I0.0为1时,为系统自动运行状态。 本程序的主程序、回路表初始化程序SBR_ 0、初始化子程序SBR_ 1和中断程序INT_ 0以及对应的语句表如图3 - 127所示。其中在SBR_ 0子程序中进行PID参数设置及定时中断服务子程序的启动,在定时中断服务子程序INT_ 0中进行数据的标准化、PID指令的执行及控制量的输出模拟量输入通道为AIW0,模拟量输出通道为AQW0。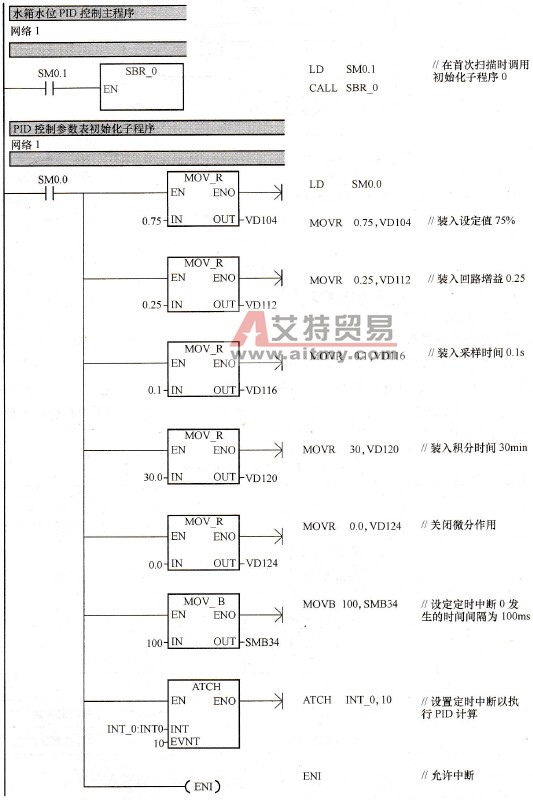
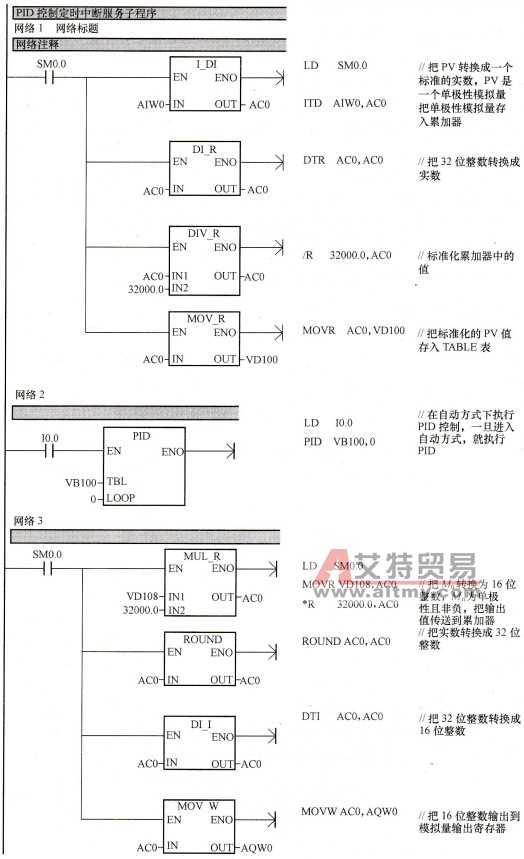 图3-127 水箱水位PLC控制程序图 (3) PID指令编程总结。 1)采用主程序、子程序、中断程序的程序结构形式,可以优化程序结构,减少周期扫描时间。 2)在子程序中,先进行组态编程的初始化工作,然后再设置定时中断,以便周期性地执行PID指令。 3)在中断程序中要做三件事:将由模拟量输入模块提供的过程变量PVn转换成标准化的实数并填入回路表中;设置PID指令的无扰动切换条件,并执行PID指令;将PID运算输出的标准化实数值Mn先刻度化,然后再转化为有符号整数,最后送至模拟量输出模块,以实现对外部设备的控制。 4)用PID指令编写程序,首先要了解PID控制的原理,其次要了解参数表中各个参数的含义;当然最终要得到满意的结果,还要对P、I、D三个参数进行调节,这是难点,需要经验的积累。此外,硬件线路的接线正确和变频器参数设定正确也是很重要的。
图3-127 水箱水位PLC控制程序图 (3) PID指令编程总结。 1)采用主程序、子程序、中断程序的程序结构形式,可以优化程序结构,减少周期扫描时间。 2)在子程序中,先进行组态编程的初始化工作,然后再设置定时中断,以便周期性地执行PID指令。 3)在中断程序中要做三件事:将由模拟量输入模块提供的过程变量PVn转换成标准化的实数并填入回路表中;设置PID指令的无扰动切换条件,并执行PID指令;将PID运算输出的标准化实数值Mn先刻度化,然后再转化为有符号整数,最后送至模拟量输出模块,以实现对外部设备的控制。 4)用PID指令编写程序,首先要了解PID控制的原理,其次要了解参数表中各个参数的含义;当然最终要得到满意的结果,还要对P、I、D三个参数进行调节,这是难点,需要经验的积累。此外,硬件线路的接线正确和变频器参数设定正确也是很重要的。

点击排行
 PLC编程的基本规则
PLC编程的基本规则