

![]() 来源:艾特贸易2017-06-05
来源:艾特贸易2017-06-05
简介图 3-32 所示为用机械手移送工件的机械系统。左上作为原点,工件按下降、夹紧、上升、右移、下降、放松、上升、左移的次序依次运行。下降/上升、左移/右移中使用双螺线管的电
图3-32所示为用机械手移送工件的机械系统。左上作为原点,工件按下降、夹紧、上升、右移、下降、放松、上升、左移的次序依次运行。下降/上升、左移/右移中使用双螺线管的电磁阀,夹紧使用的是单螺线管的电磁阀。图3-33所示为状态转移图。 特殊辅助继电器: M8044(原点位置条件):这个元件由原点的各传感器驱动,它的ON状态作为自动方式时的允许状态转移的条件。 M8043(回原点完成):用状态S10~ S19作回零操作,在最后状态中在自我复位前先将M8043置1。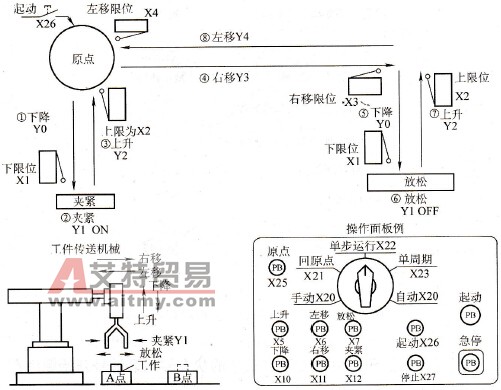 图3-32 用机械手移送工件的机械系统
图3-32 用机械手移送工件的机械系统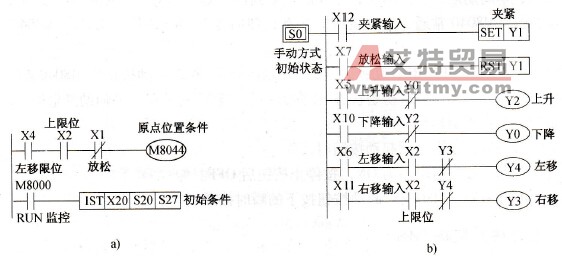
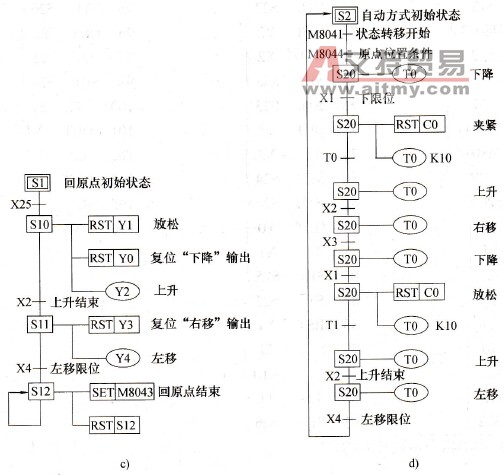 图3-33 状态转移图 下面是图3-33所示状态转移图对应的程序:
图3-33 状态转移图 下面是图3-33所示状态转移图对应的程序: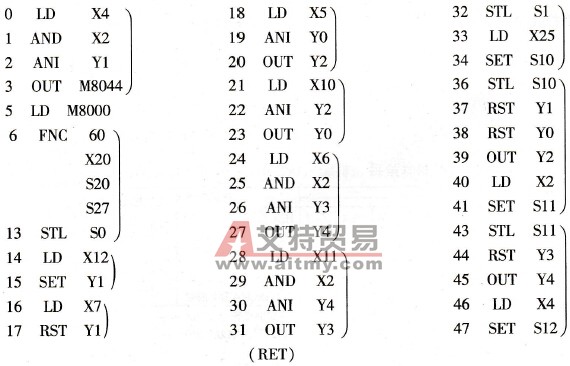
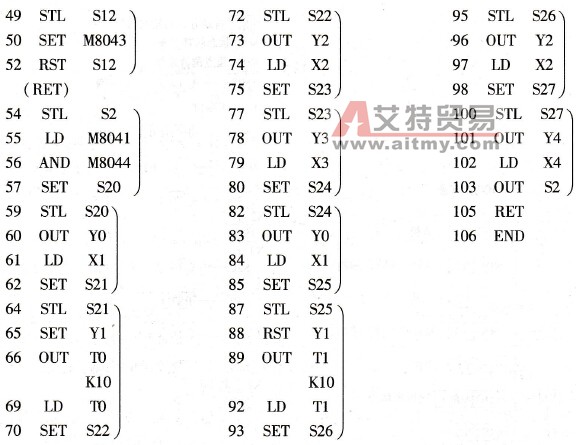 注:( )中的指令不是必需的。
注:( )中的指令不是必需的。

 PLC编程的基本规则
PLC编程的基本规则





